Lengthening Mars rover mission presents challenge to Cornell researchers and students working in operations center
By David Brand
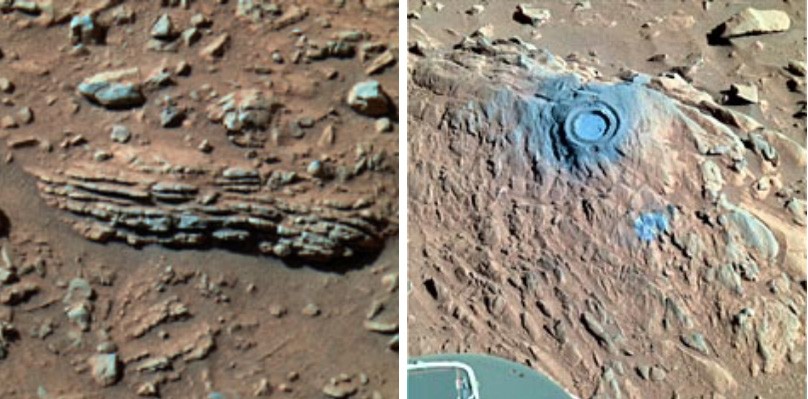
These latest images, captured the rover Spirit's panoramic camera, or Pancam, in the Columbia Hills, were released Nov. 4 by NASA's Jet Propulsion Laboratory in Pasadena, Calif. Jim Bell, associate professor of astronomy at Cornell, leads the Pancam team, and the pictures were analyzed and calibrated in the MarsLab on the Cornell campus. The image on the left is a false color infrared composite image of a hole ground into the rock "Uchben" by Spirit's rock abrasion tool on sol 293. The image on the right is a false color infrared composite image of a small, layered rock, dubbed "Tetl," taken on sol 264.
Since the Mars rovers Spirit and Opportunity landed on the red planet last January, members of the Cornell University rover team have gone from living and working on Mars time at the Jet Propulsion Laboratory (JPL) in Pasadena, Calif., to running their operations from Cornell in Ithaca on a hybrid Earth-Mars time.
The planning and operations that must occur twice each day – between the time when "yester-sol's" data reach Earth until commands for the next sol's activities are sent off to the rovers – is becoming more efficient. It now takes just six or seven hours on average, compared with the 17 hours it once took. (A sol, a Martian day, is 39 minutes, 35 seconds longer than an Earth day.)
And no end to the mission is in sight. The original "warranty" assigned to the rovers was 90 sols, which expired seven months ago, and on Oct. 1 NASA extended the mission for a further six months.
That presents a challenge to the 28 people who, since last August, have been working long hours in the rover operations center on the fourth floor of the Cornell Space Sciences Building. Their number includes 13 researchers and staff, 12 working undergraduates and 3 graduate students.
"What sets this mission apart from almost every other planetary mission that has ever flown is that every time a rover moves, you're someplace new in an unexplored terrain, and you have to use that information to inform the decision process for the coming sol," says Cornell Astronomy Professor Steve Squyres, who heads the mission's scientific team.
The rovers are commanding the Cornell staff's attention almost around the clock – even though the deepest, darkest part of the Martian winter began in October, and the original plan was to allow the rovers to spend more time idling in the weak winter sunlight to recharge their batteries. Nor have operations missed a step due to power losses from the thickening layer of windborne dust that has been collecting on the rovers' solar-array panels. NASA planners had assumed that the rovers would last only 90 days because of the dust buildup. However, says
Almost stuck–Wheel tracks from NASA's Mars Exploration Rover Opportunity show where the rover struggled for traction while driving away from "Wopmay" rock inside "Endurance Crater." The rover looked back for this view from its navigation camera on its 272nd martian day
Squyres, "We had enough margin built into the design that even with the lower power output, we're still able to do operations."
He notes, "The rate of dust buildup has slowed, and when you combine that with the fact that we've gotten clever about parking these things on north-facing slopes where the sunlight is stronger, we've found that we don't need recharge sols. Both rovers have been active throughout the Martian winter, and soon we'll start to see spring coming on."
Detailed instructions still must be sent to the rovers, says Squyres, although planning that would typically take months for some planetary missions must be compressed into a few hours. After much refining, the rover team has streamlined the planning process into a daily regimen of 10 meetings, five for each rover, which are now conducted remotely from home institutions. Planners at Cornell, Arizona State University, Washington University in St. Louis, JPL and in Germany communicate via Polycom, a Web-, tele-, and video-conferencing system.
The main meetings, by the Science Operations Working Group (SOWG), are conducted twice daily, once for Spirit and once for Opportunity. On a given day there are 16 specific positions that must be filled for each rover by science team members at Cornell or one of the other institutions, not including NASA engineers. Squyres keeps a spreadsheet schedule weeks in advance of who will fill what position on a given day. "Nobody works two rovers on the same sol: It is absolutely flat out impossible," says Squyres.
The 16 positions are:
- The SOWG chair, the leader of the day's events, a position commonly filled by Squyres, or by one of the other lead scientists.An SOWG documentarian, responsible for recording everything discussed at the meetings and for keeping track of the details of the rover sequence plan for the day. Cornell documentarians include graduate student Zoe Learner, and research support specialists Diane Bollen, Jon Proton and Elaina McCartney.
- The KOP (keeper of the plan), stationed at JPL, takes the science goals of all the participating institutions and assembles them into a plan of action. McCartney is Cornell's KOP.
- The LTP (long-term planning lead), also stationed at JPL, makes sure the day's activities are in keeping with the long-term goals of the rover mission.
- Six PDLs (payload downlink leads), responsible for downloading and analyzing data from the rover's instruments and the Pancams. Cornell PDLs are Jim Bell, the Cornell astronomer who heads the team for the rovers' panoramic camera, or Pancam, team; research support specialists Jascha Sohl-Dickstein, Miles Johnson, Heather Arneson and Rob Sullivan; and graduate student Jason Soderblom.
- Six PULs (payload uplink leads) responsible for generating commands for the following sol that must be uploaded to the instruments and the Pancams on the rovers at the end of each day. Cornell PULs are McCartney, Proton, Johnson and Arneson.
A typical day in the life of a Cornell rover scientist begins at about 11 a.m. with a half-hour meeting at which the previous day's data are reviewed and the next day's plan is worked out.
At the midday SOWG meeting, the chair, documentarian, Pancam PDL and PUL and other science team members gather in the Cornell operations center to plan rover activities, including data to be generated and energy to be consumed by the vehicles. The center has a 3-foot by 4-foot flat-screen TV, the MERboard, used to display the daily rover plan. As participants dial into the Polycom, the Cornell center becomes linked to similar rooms at JPL and at other science team institutions. When someone in one of the conference rooms starts to speak, the LCD projector automatically switches to a view of the speaker.
At 1:30 pm., JPL engineers and the PULs take the SOWG plan and create a highly detailed computer model of the rover's activities for the day. Squyres must be available to answer questions and to troubleshoot. The documentarian at his side keeps careful track of the changes to the SOWG plan.
At 2 p.m. there is a briefing by a JPL engineer on such things as power and time status. With approval given by all, the team starts building the plan's computer programs. By now the PULs have built their individual "submaster" computer sequences, which need to be strung together into a "master sequence." Finally, the sequence integration engineer makes sure the master sequence makes sense.
At 3 p.m. the master and submaster programs are triple-checked. By this time the only people left are the SOWG chair, the documentarian and the engineers. The engineers run a software simulation of the rover to make sure they don't "break" anything when they run the master program on the rover.
At 6 p.m. the command approval meeting provides one last chance to catch mistakes. With assurances given, the SOWG chair and the JPL mission manager give their thumbs up.
Then, and only then, are the commands sent to NASA's Deep Space Network and on to the waiting rovers on Mars.
Media Contact
Get Cornell news delivered right to your inbox.
Subscribe